Romain, new to the team, is actively working on a mechanism, small but very important for the robot: “the shoulder”.
This mechanism will connect the grabber and the elevator created by Noé. Compatibility us important. Indeed, this “shoulder” must adapt to Noé’s 2 mechanisms and remain as small as possible.
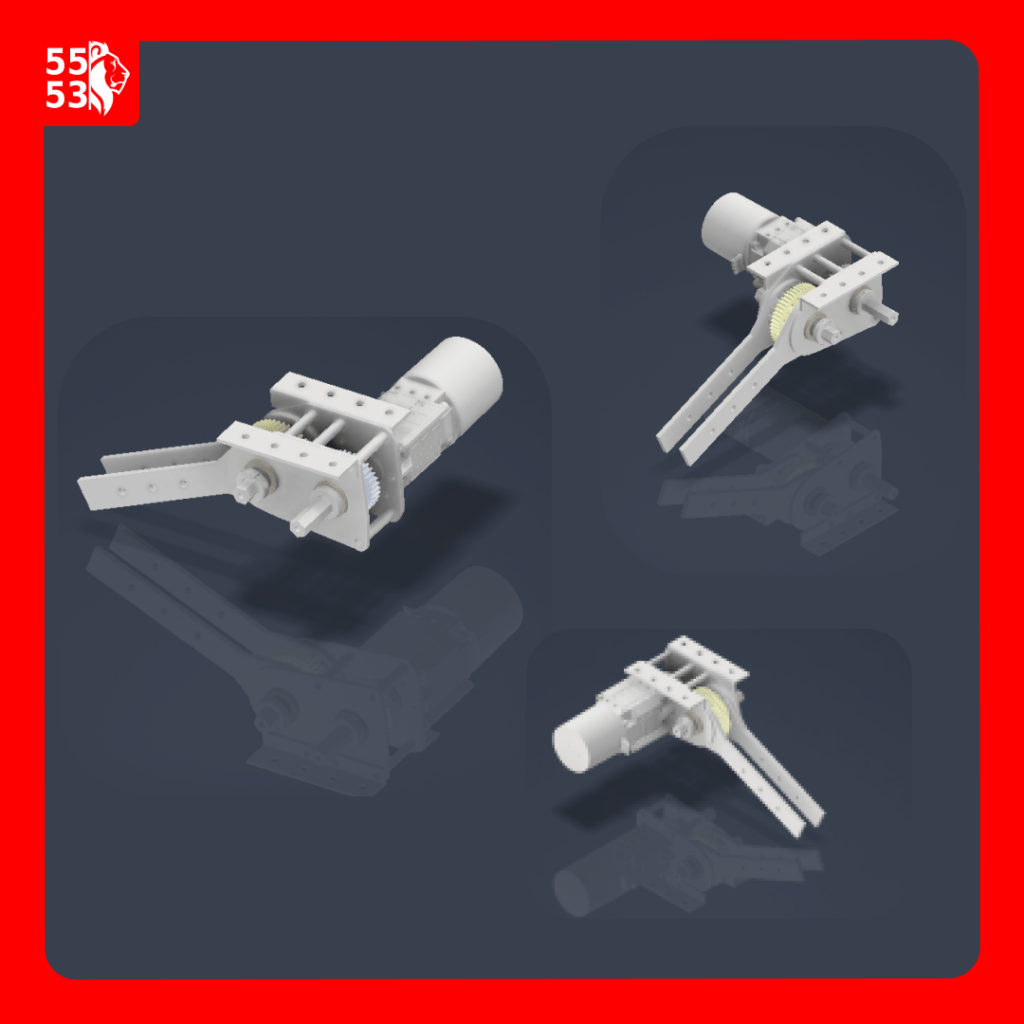
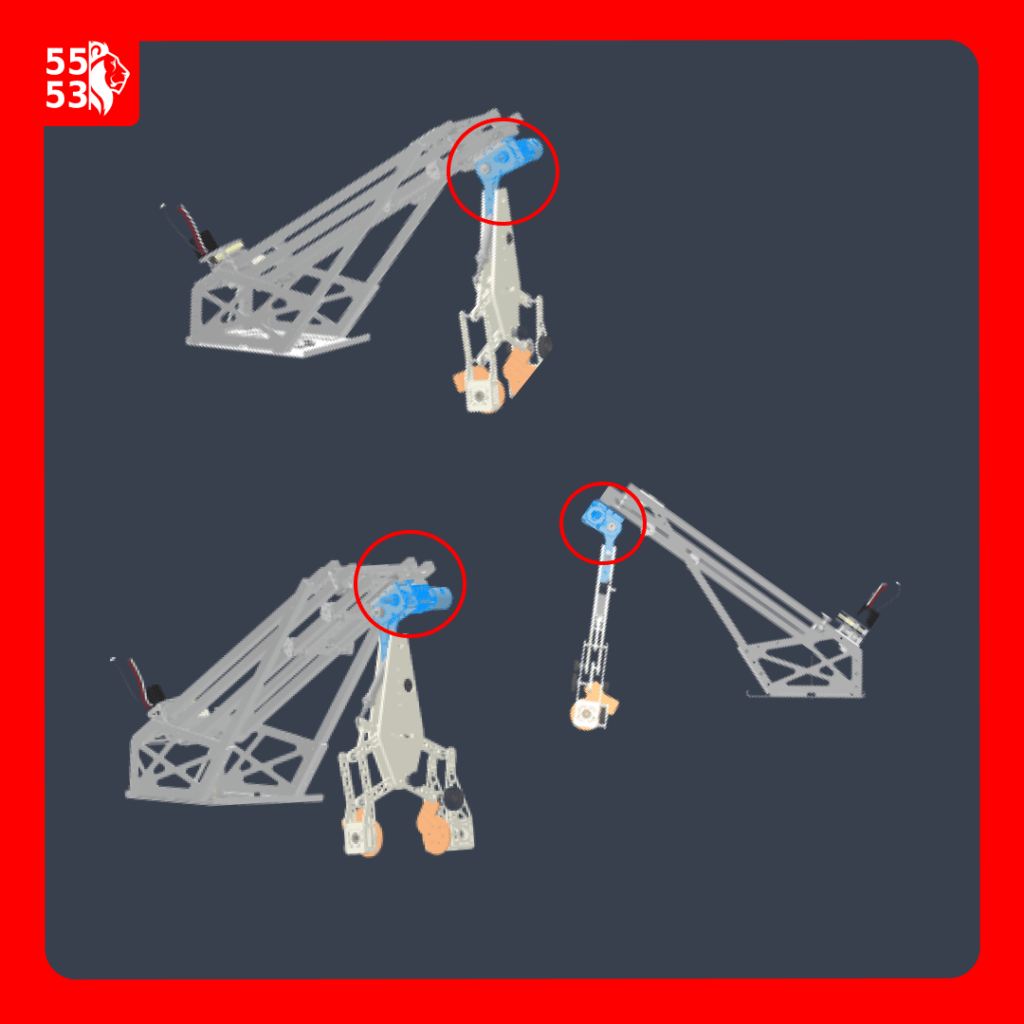
Romain has just finished this prototype and is moving on to a new one which will be articulated this time!
To be continued…