Romain, nouveau dans l’équipe, travaille activement sur un mécanisme, certes petit, mais indispensable au robot : « l’épaule ».
Ce mécanisme va permettre de relier la pince et l’élévateur créés par Noé. Le principal problème : la compatibilité. En effet, cette « épaule » doit s’adapter au 2 mécanismes de Noé tout en restant la plus petite possible.
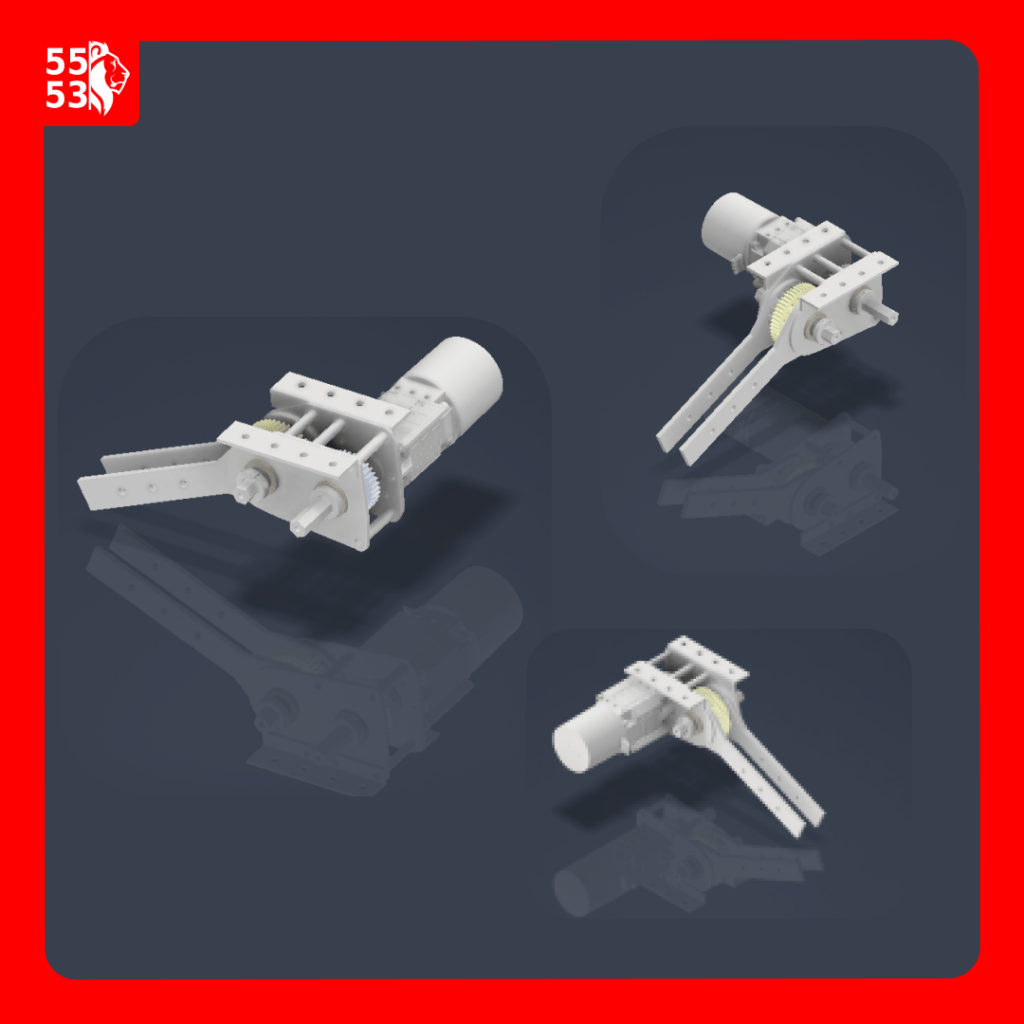
Romain vient juste de terminer ce prototype et enchaîne sur un nouveau qui sera articulé cette fois-ci !
Affaire à suivre…
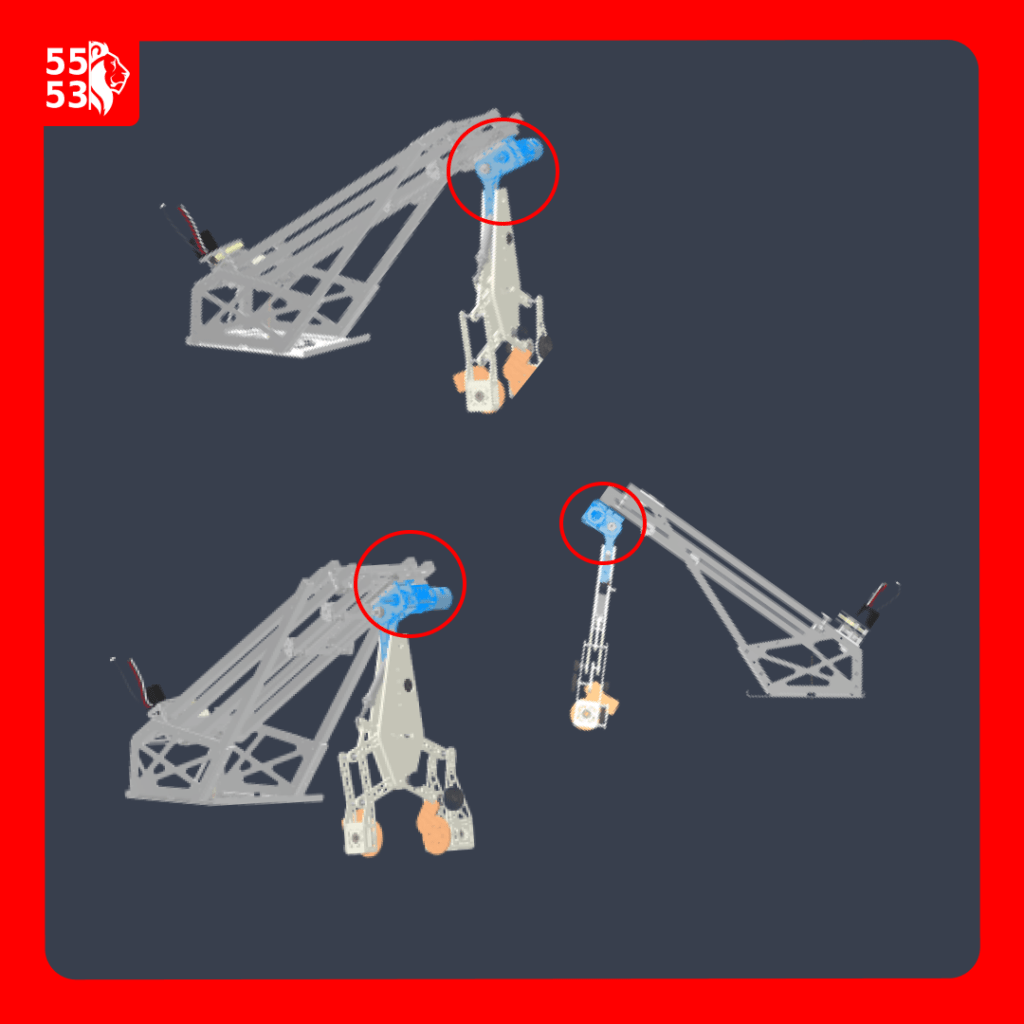
Nous venons de recevoir différents mécanismes, notamment le bras articulé. Après une version faite par romain, Yohan a repris la main pour l’améliorer grâce aux compétences qu’il a acquises ces 3 dernières années.


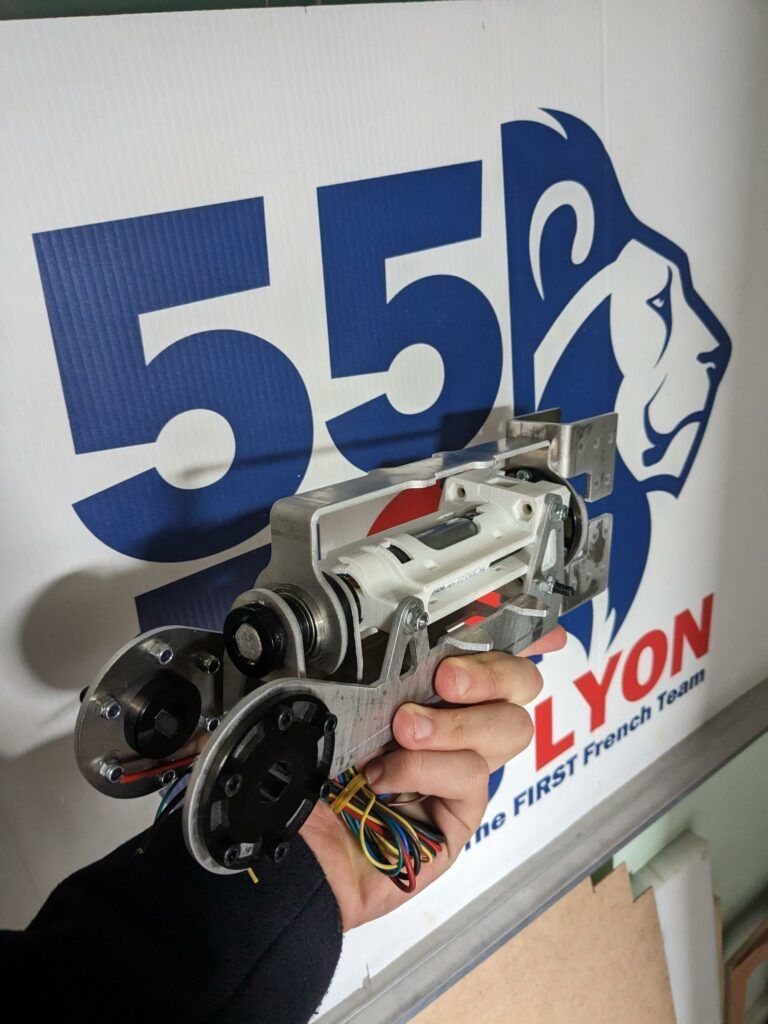
Ce mécanisme effectue des rotations pour faire bouger la pince et donc aider au positionnement des cubes et des cônes. Il est réalisé en Aluminium mais aussi avec des pièces faites en plastique, imprimées avec nos imprimantes 3D.
Tests à venir très prochainement…