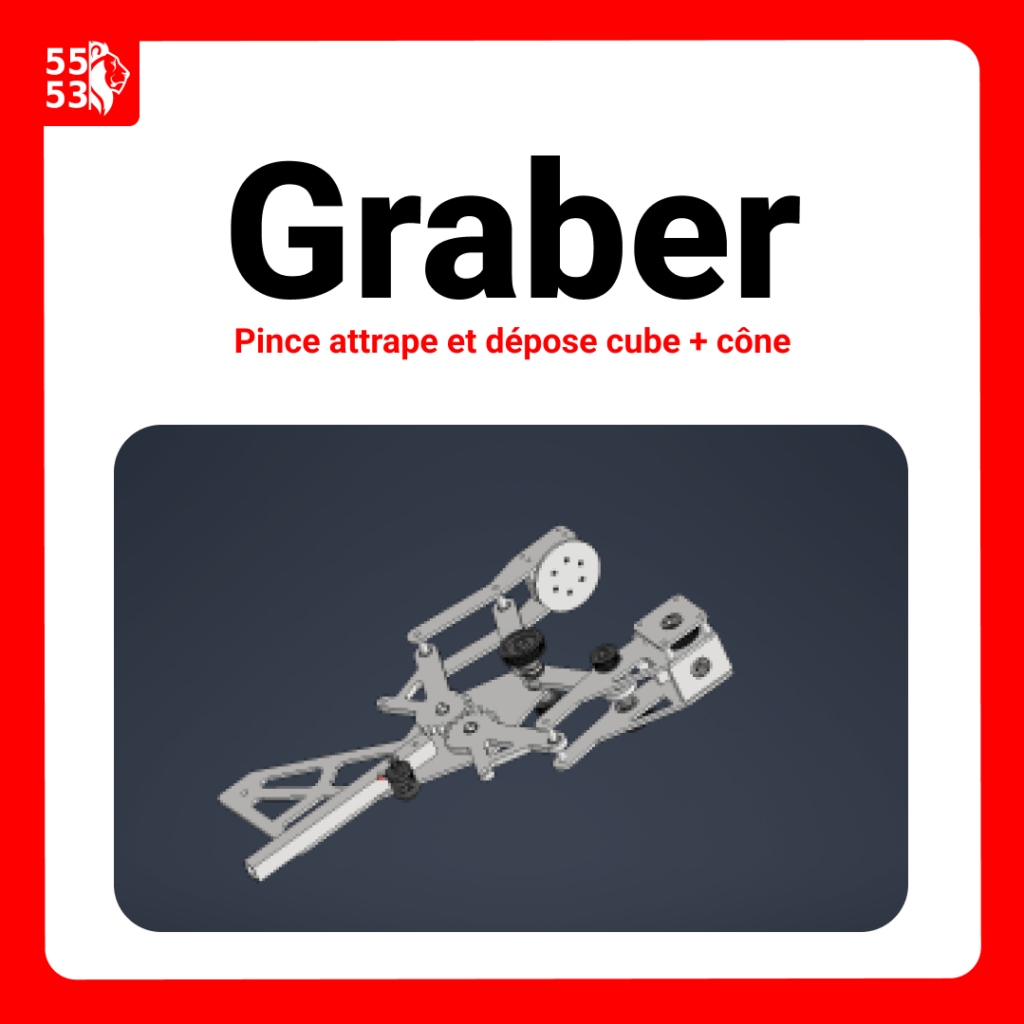
Noé is leading the grabber project for our robot this year.
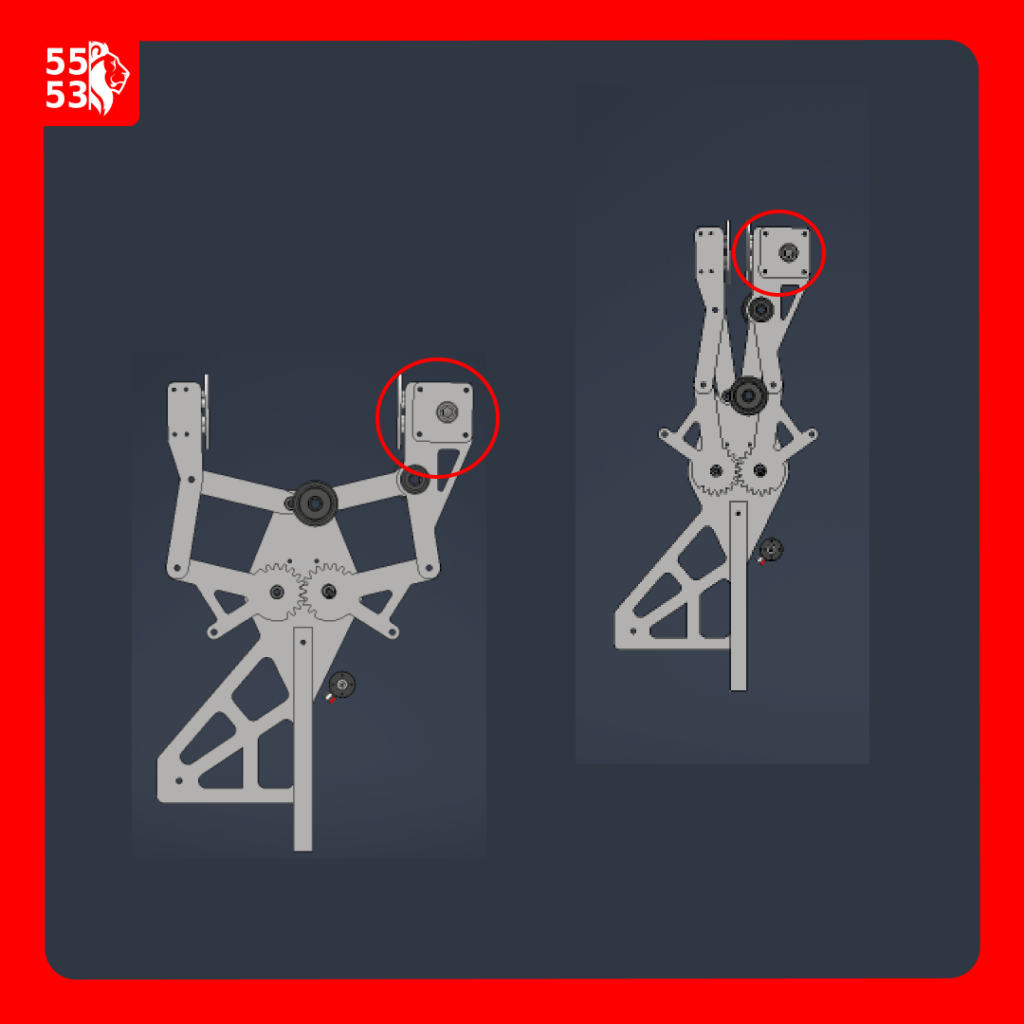
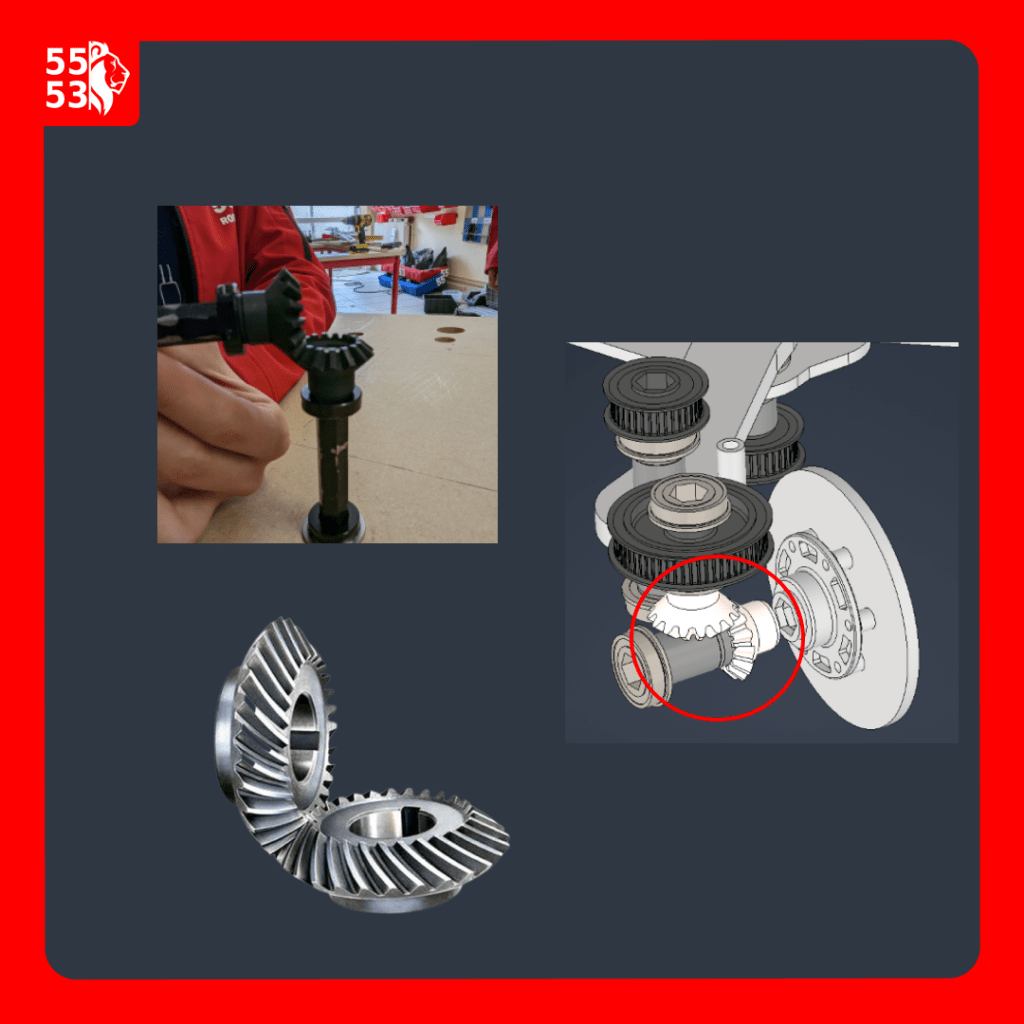
The grabber will be used to grab the cube and the cone and then to place them in the right spot on the Grid. The team has imagined an ingenious system! The grabber will not only be able to grasp, but also to tilt the cone into the right position thanks to a “bevel”.