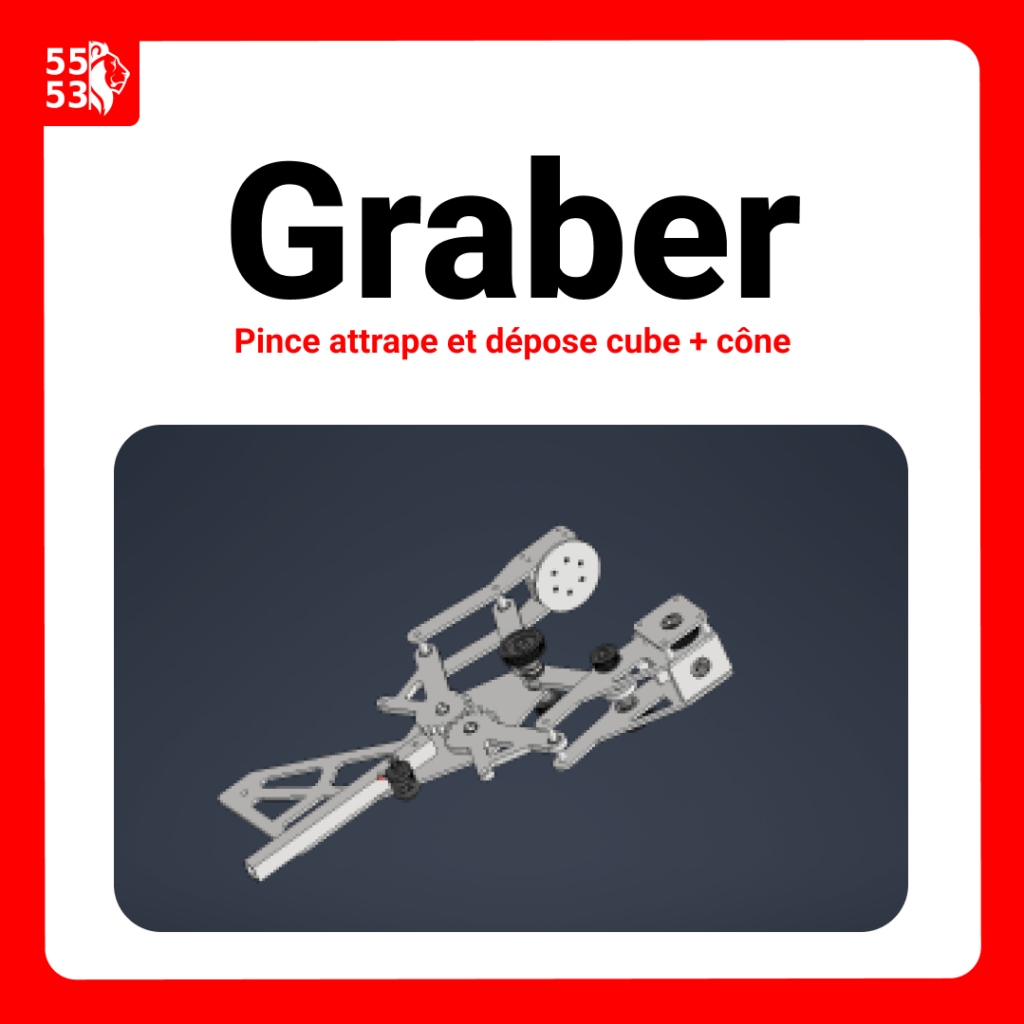
L’équipe propose un ingénieux système !
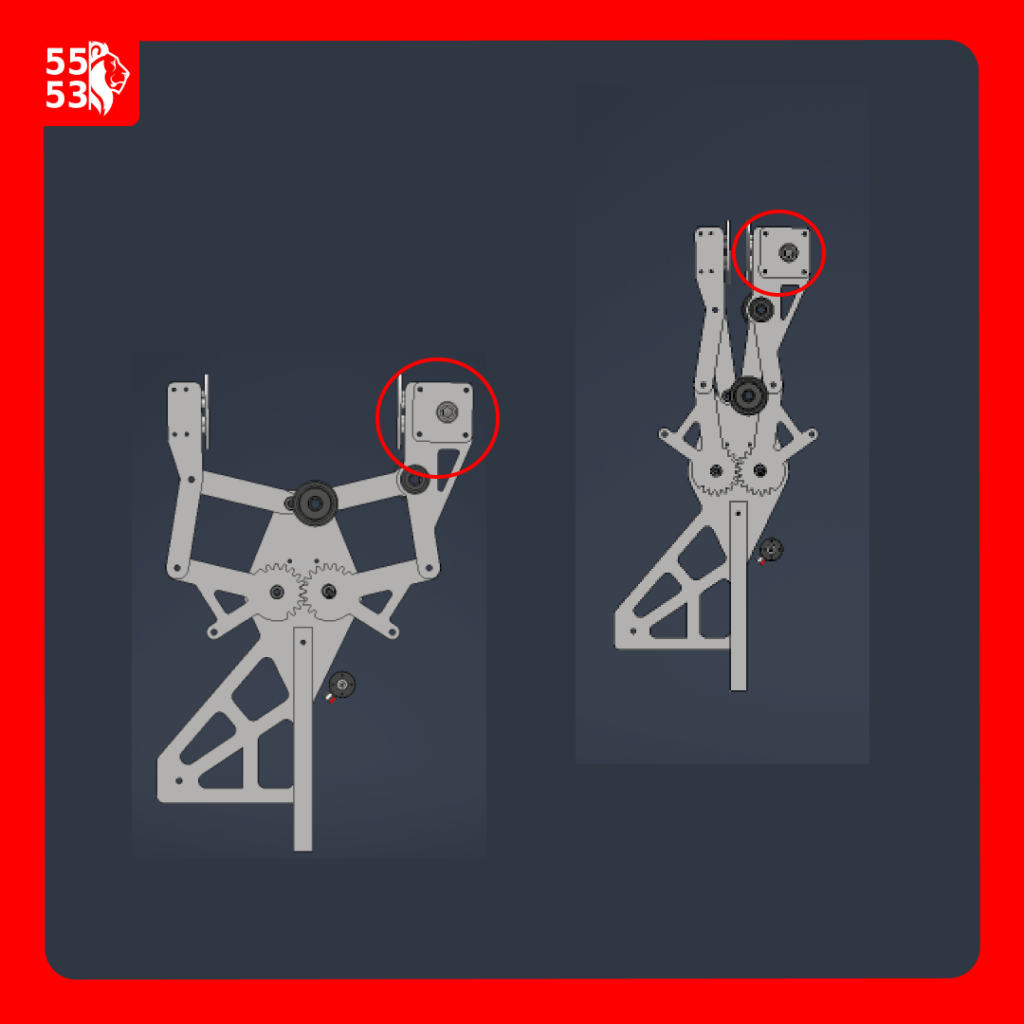
En effet, Noé pilote le projet de pince pour notre robot cette année. La pince va servir à saisir le cube et le cône puis, les déposer au bon emplacement dans l’un des éléments de jeu du terrain, la Grid.
La pince sera capable, non seulement de saisir, mais également de basculer le cône dans la bonne position grâce à un « bevel gear » (un renvoi d’angle).
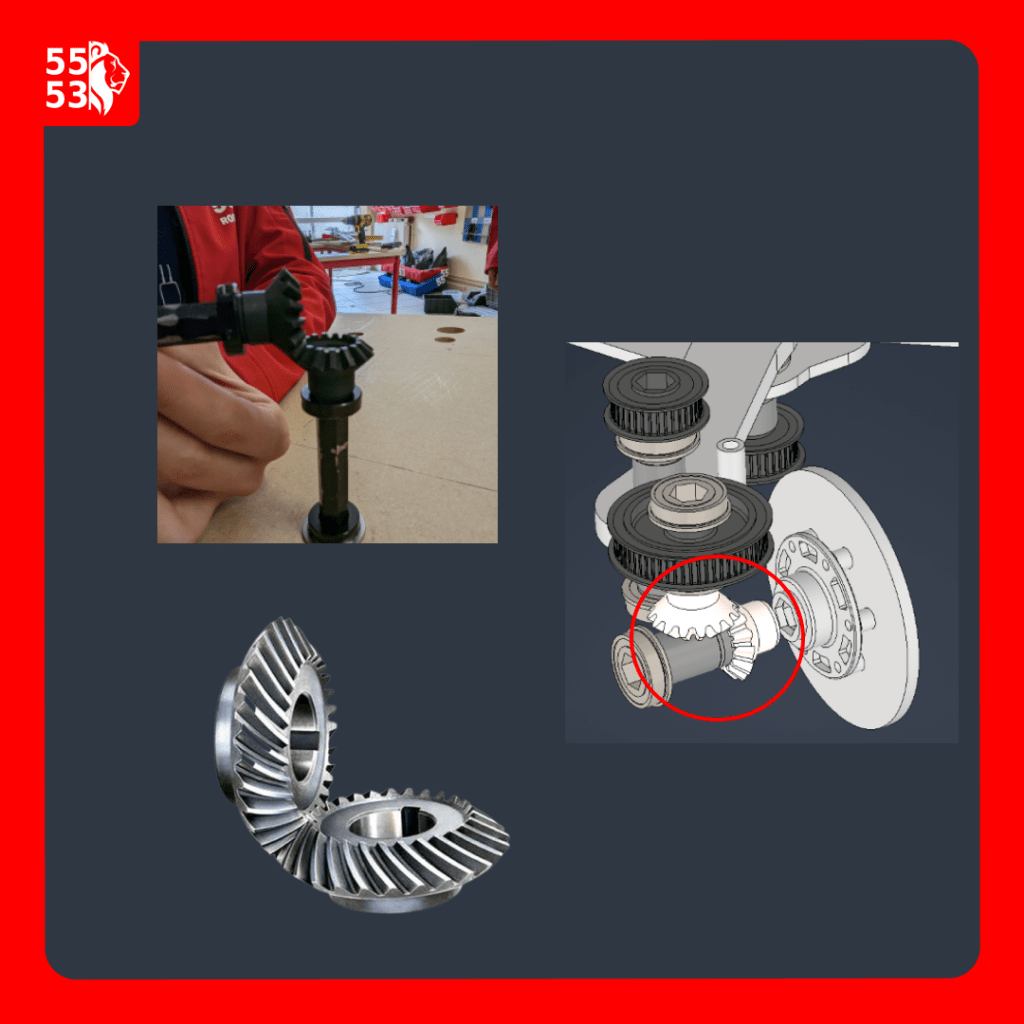
Le principe : un axe qui tourne verticalement entraîne un autre axe qui le fait tourner horizontalement