Like the previous years, the teaser is mouth-watering, but doesn’t show much.
You can judge by yourself !
The kickoff is always an intense moment, because we finally have a precise idea of the game and the robot we will have to design !
All this deserves a few explanations…
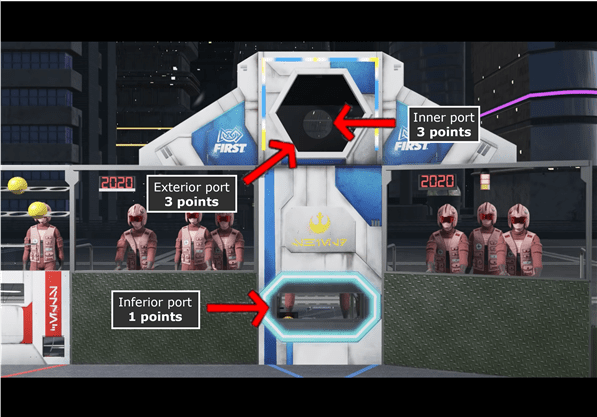
Robots have to collect balls and throw them in the 3 holes of their power port to score points.
Each hole has a different difficulty and scores a different number of points : the bottom port (1 point), the outer port (2 points) and the inner port (3 points).
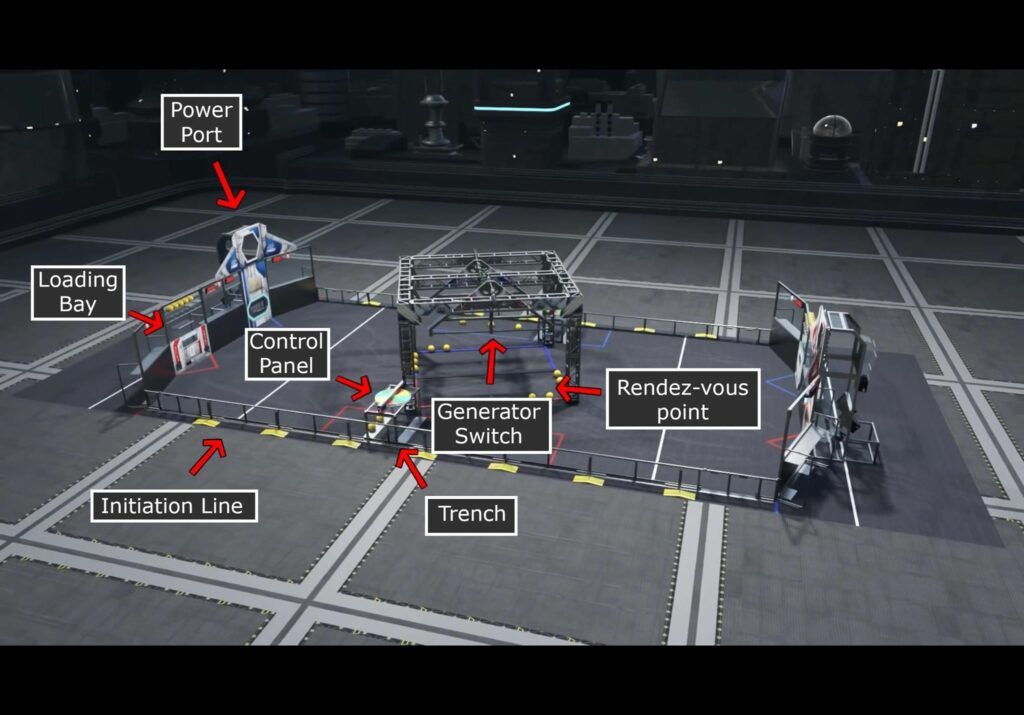
Robots can pick up balls on the ground or at the loading bay located in their area (on the side of their alliance station).
Robots can cross the filed going through their alliance tunnel, or through the “shield generator” at the center of the field.
At the end, robots have to gather in the “rendez-vous point”, and hang themselves on a scale in order to balance it.
A match progress
Before the match
At the beginning of a match, the three robots of the alliance are being placed on their initiation line.
They are loaded with 1, 2 or 3 balls according to their team’s choice.
Autonomous Period
The match begins with an autonomous period of 15 seconds.
The robot evolves only through a program and is not driven by the pilot.
During this period, the robot has to score points in the power port by throwing balls in the three holes.
Every points scored during the autonomous period are doubled.
Teleoperated period
The next 2 minutes and 15 seconds are remote controlled.
The pilot takes control of his robot and keeps on throwing balls in the power port af his alliance.
While scoring points, the alliances have to successively activate 3 levels, by performing specific tasks on the field.
Level 1 : Score 9 balls in the power port
Level 2 : Score 20 balls and turn the wheel (the “control pannel”) 3 to 5 turns (10 points). If the number of turns is ecxeeded, the turn count starts over.
Level 3 : Score 20 balls and turn the wheel to make it stop on a specific color (20 points). The colour is randomly given to each alliance at the beginning of the match.
The endgame
During the last 30 secndes of the match, robots have to go to the endez-vous point (5 points) and hang themselves on the scale located in the same area (25 points each robot).
If the scale is balanced , i.e. the bar is horizontal, the alliance scores 15 points.
The alliance with the most points wins the match.