Depuis la rentrée , une partie de l’équipe CAO qui conçoit les mécanismes sur le logiciel INVENTOR s’est intéressée au mécanisme « INTAKE » qui permet de ramasser des objets au sol.
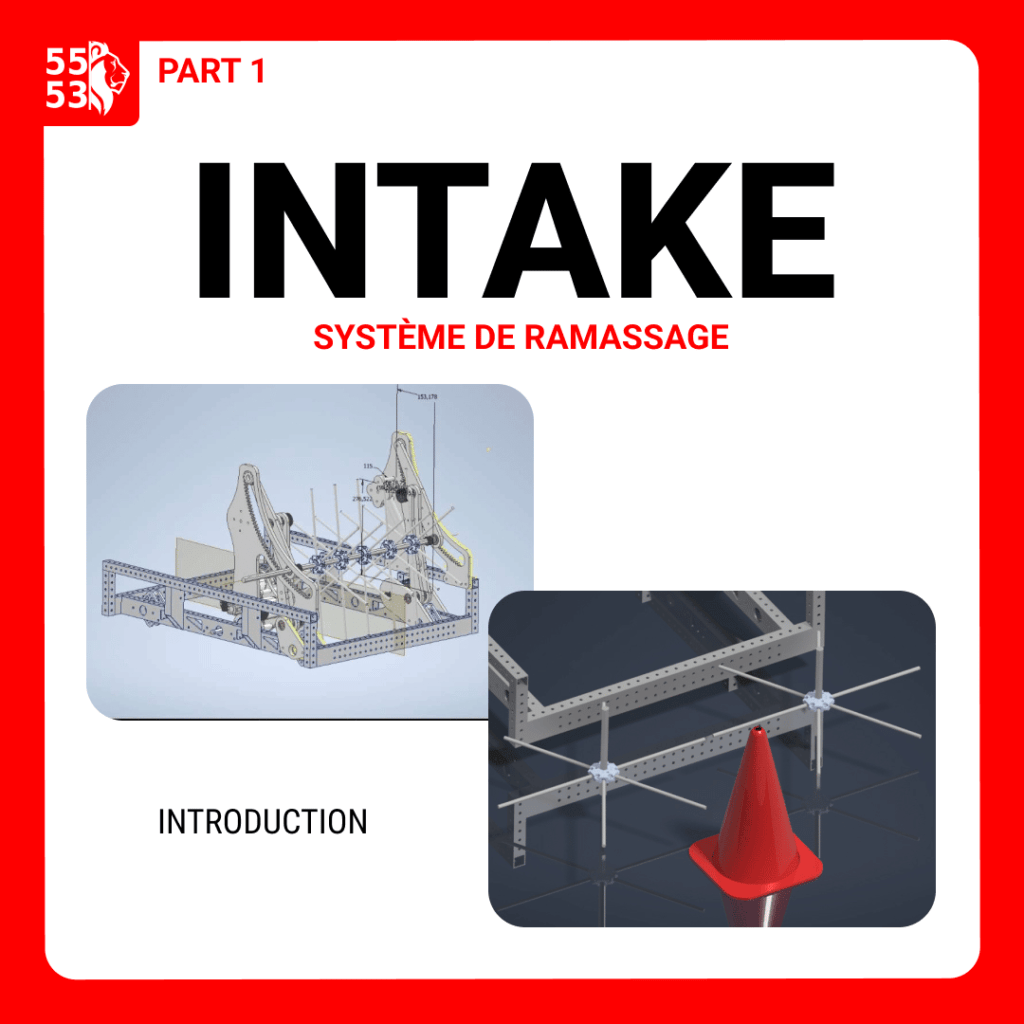
L’équipe souhaite que l’INTAKE puisse ramasser un cône, élément de forme complexe, difficile à attraper. Elle a imaginé un système de balais rotatif, entrainant l’objet vers l’intérieur du robot, qu’elle a décliné en 2 prototypes.
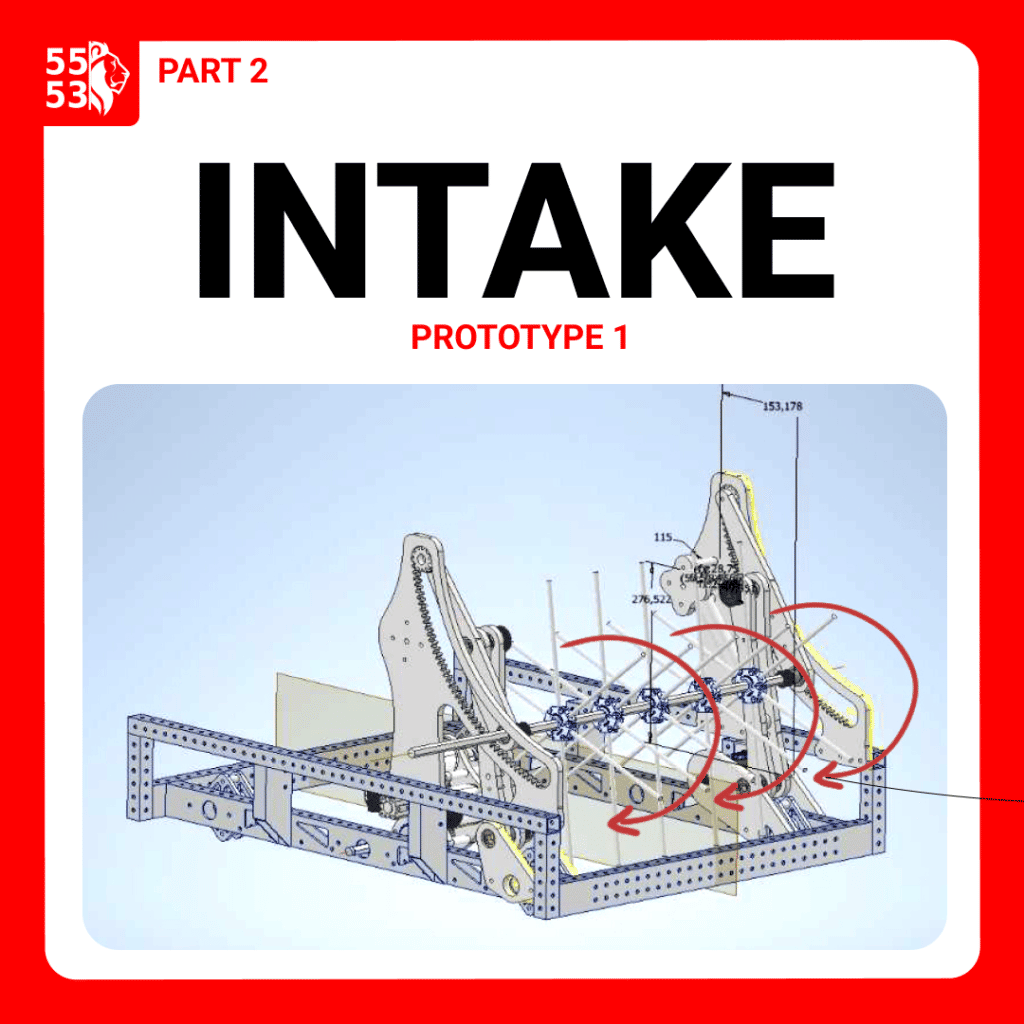
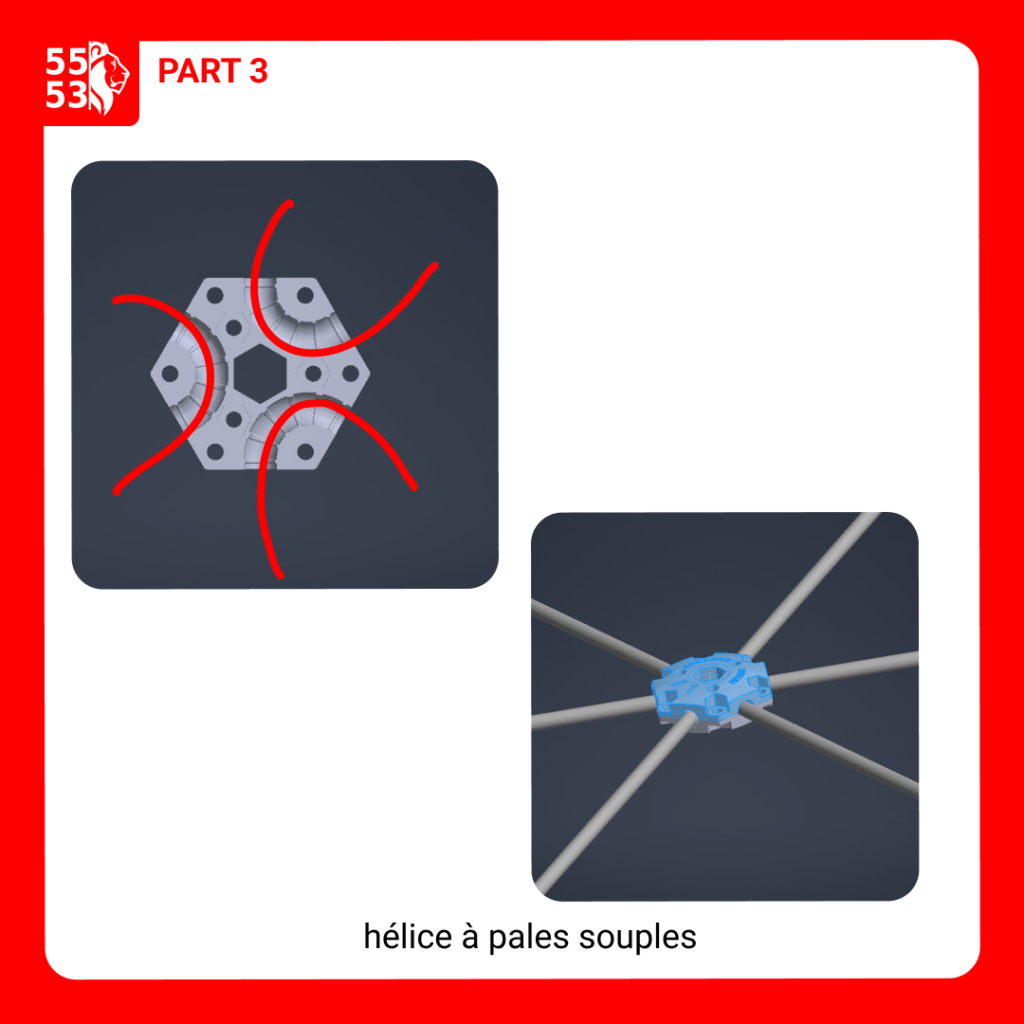
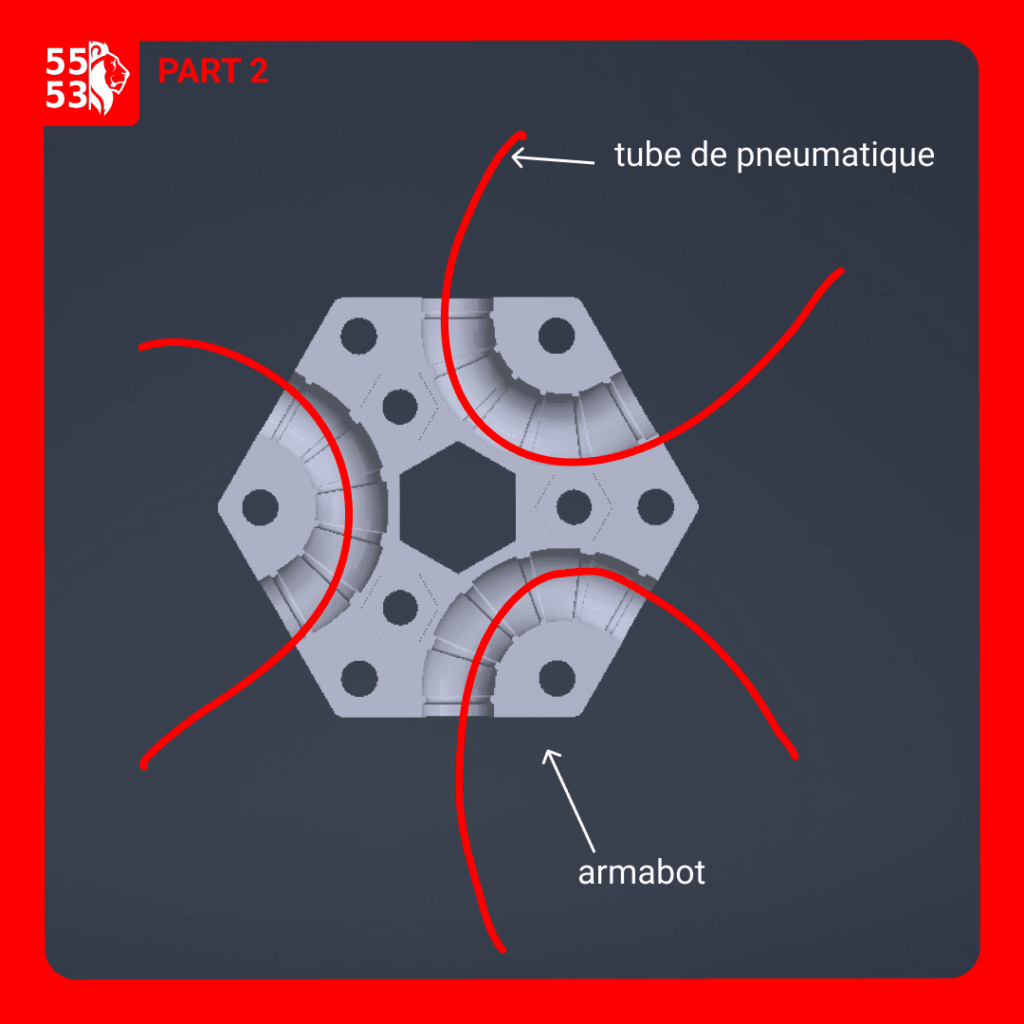
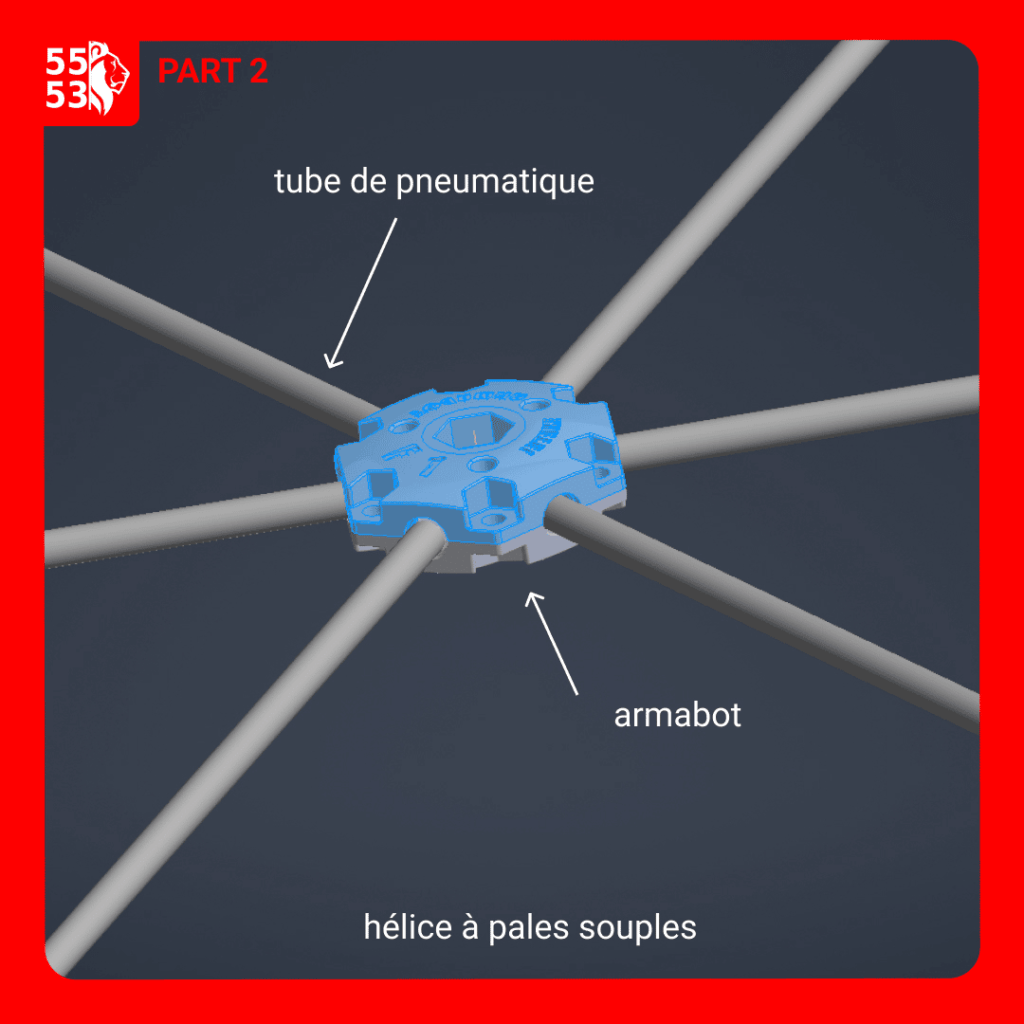
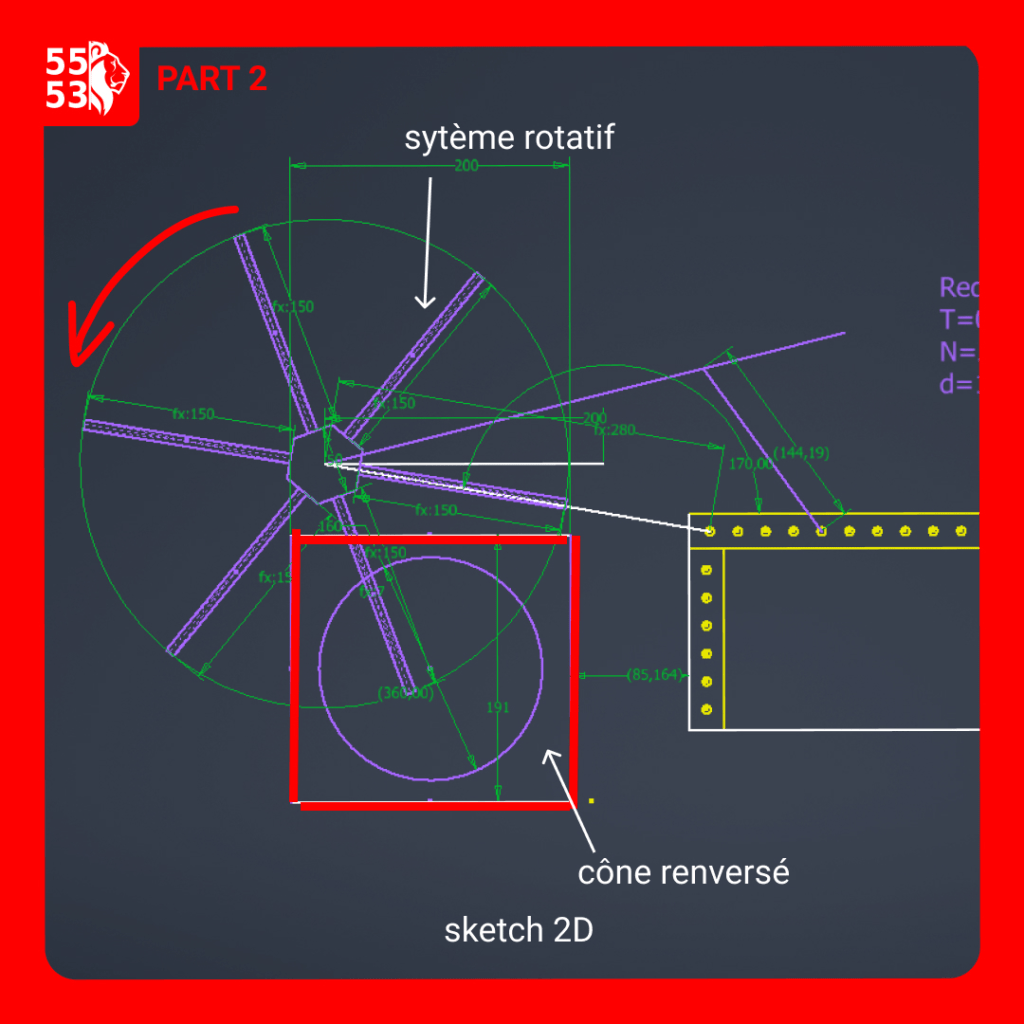
Le 1er prototype d’INTAKE est un système de balais rotatif constitué de plusieurs « hélices » à « pales » souples. Chaque « hélice » est composée de deux pièces hexagonales (« armabots »), dans lesquelles sont insérés 3 tubes souples (tubes de pneumatique) créant ainsi 6 pales. Les hélices à pales souples sont ensuite fixées sur un axe horizontal et forment ainsi le balais rotatif. Cet ensemble a la capacité de s’adapter à la forme de ce qu’il ramasse grâce à la souplesse des tubes et donc de se déformer pour mieux ramasser le cône. L’équipe a fait un sketch 2D en CAO au préalable afin de déterminer la taille et la forme de l’ensemble [voir la photo ci-dessous], puis elle a procédé à des tests.
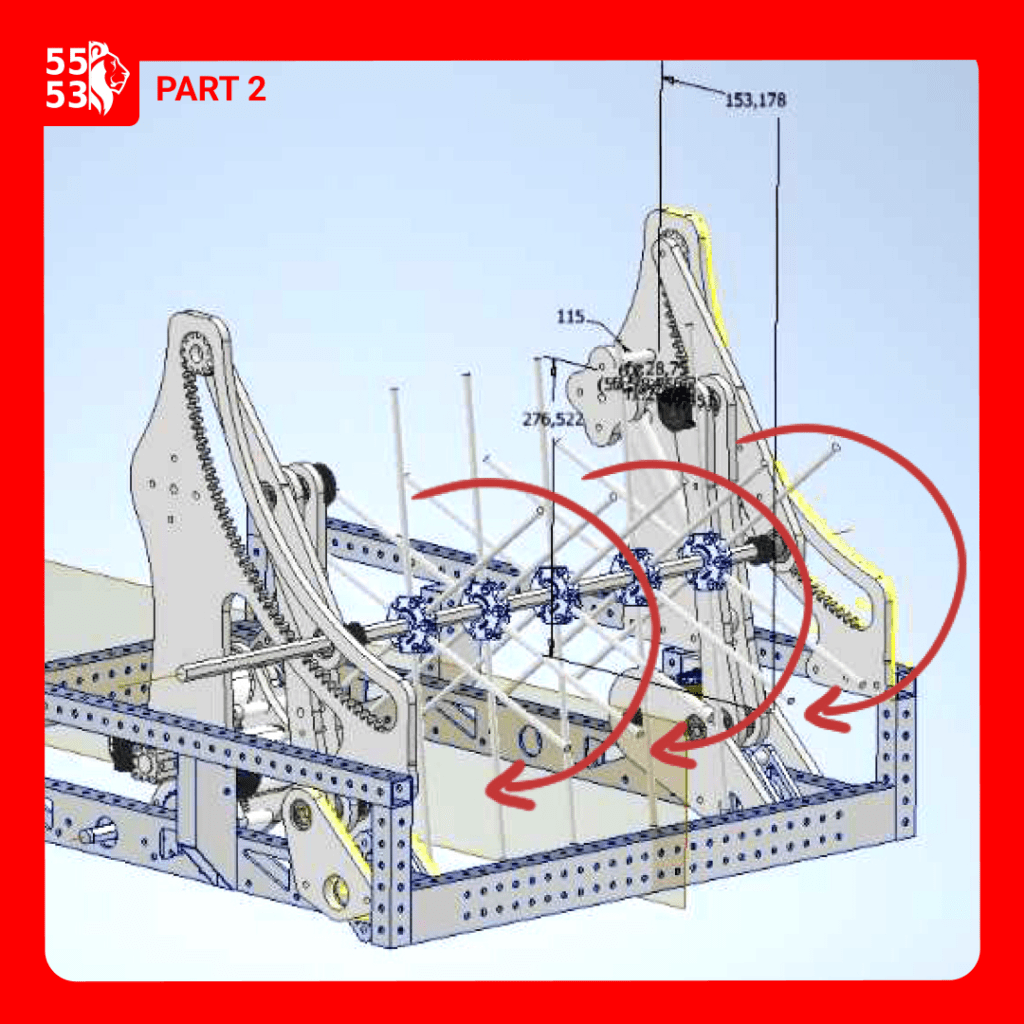
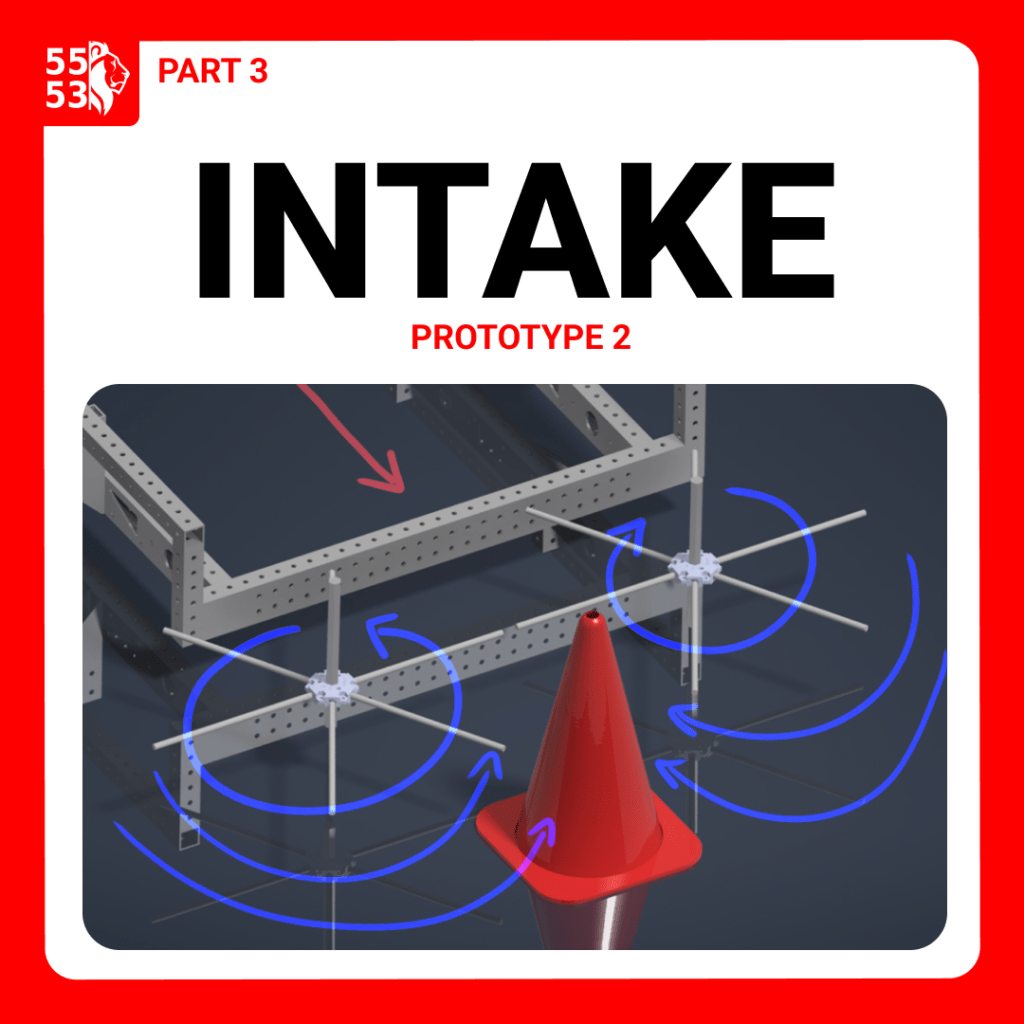
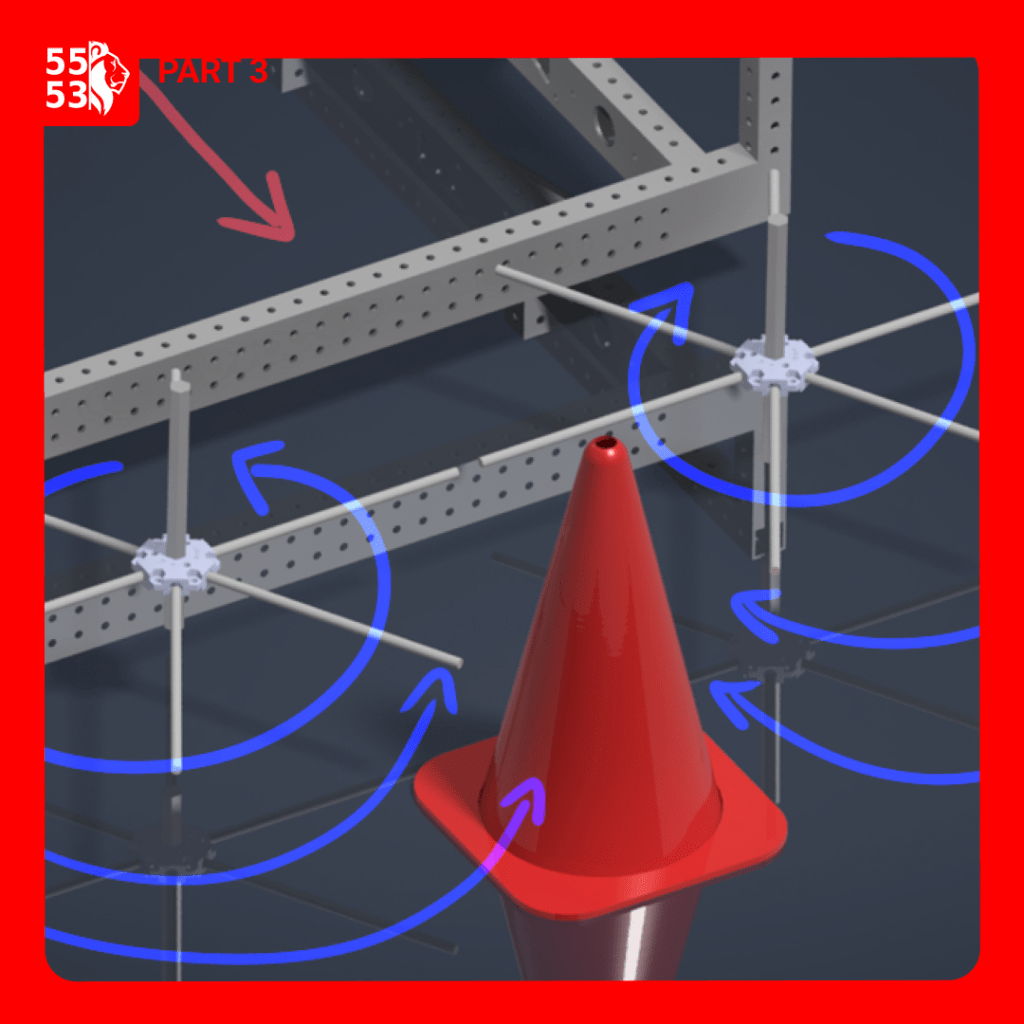
Le 2ème prototype d’INTAKE baptisé « Intake Side Roller » (désignant les roues sur le côté) est composé des mêmes hélices à pales souples que le 1er [voir le schéma ci-dessous], mais cette fois , installées sur 2 axe verticaux. Les hélices tournant de façon concentrique peuvent attraper les cônes des 2 côtés puis le propulser à l’intérieur du robot [voir le schéma 2].
L’équipe a débuté le prototypage et procédé à différents tests de simulation afin de mettre à l’épreuve l’efficacité du concept [voir la vidéo ci-dessous]. Plusieurs paramètres, notamment la hauteur des roues, ont été ajustés.