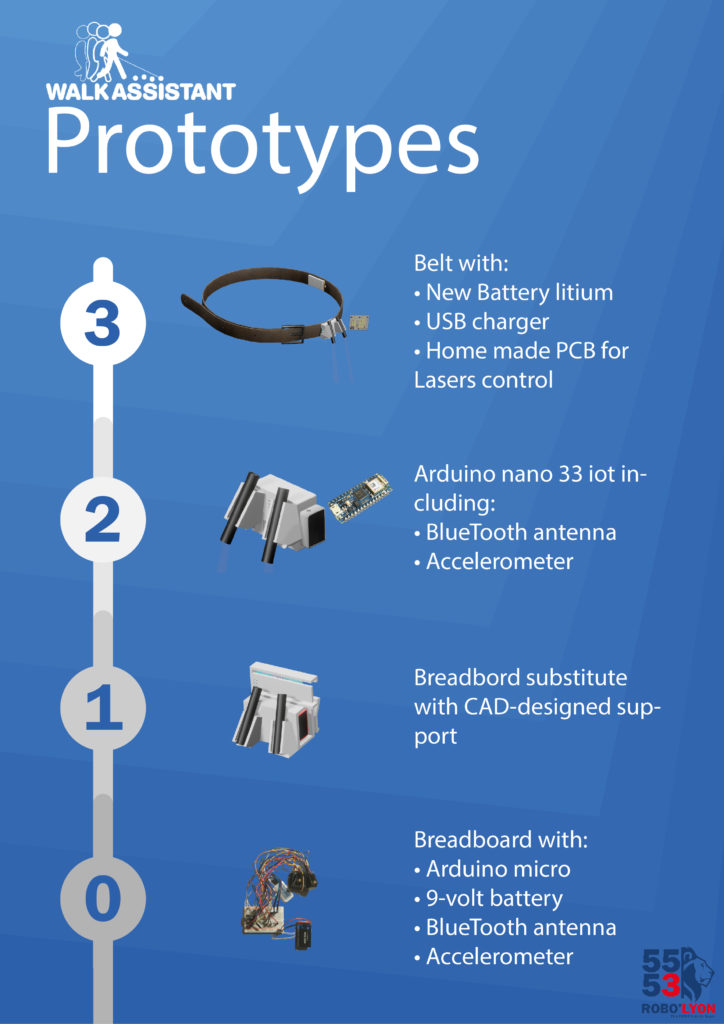
Durant le projet Innovation, notre prototype, Walk Assistant, a changé. Nous avons fait 4 prototypes avec des évolutions. Lors du prototype 0, nous avions une carte Arduino micro, une batterie de 9volts, une antenne Bluetooth et un accéléromètre. Il y avait énormément de fils qui partaient dans tous les sens.
Pour le prototype 1, l’équipe CAO a conçu un support pour les lasers et pour le système, qui ferait office de boucle de ceinture.
Après, pour le prototype 2 nous avons remplacé l’Arduino, l’antenne Bluetooth et l’accéléromètre par un Arduino nano qui inclue donc l’antenne Bluetooth et l’accéléromètre.
Désormais, nous en sommes au prototype 3. Nos composants sont fonctionnels et compatibles avec la ceinture. Il y a une nouvelle batterie, cette fois une batterie au lithium rechargeable avec un câble USB. notre PCB fait maison est aussi installé pour le contrôle des lasers.
Voici une vidéo réalisée par l’équipe Communication pour visualiser l’évolution de notre prototype : https://www.youtube.com/watch?v=jE2QmzN40bQ&t=15s