Etape indispensable pour participer à la compétition cette année, c’est un peu avant la date limite que l’équipe 5553 s’est inscrite au Challenge « At Home » !
Que doit faire notre robot ?
Le robot doit être capable de fonctionner de 2 façon différentes :
Mode « Autonomie complète »
Sans aucune intervention humaine
C’est le code du robot qui permet à celui-ci de se déplacer
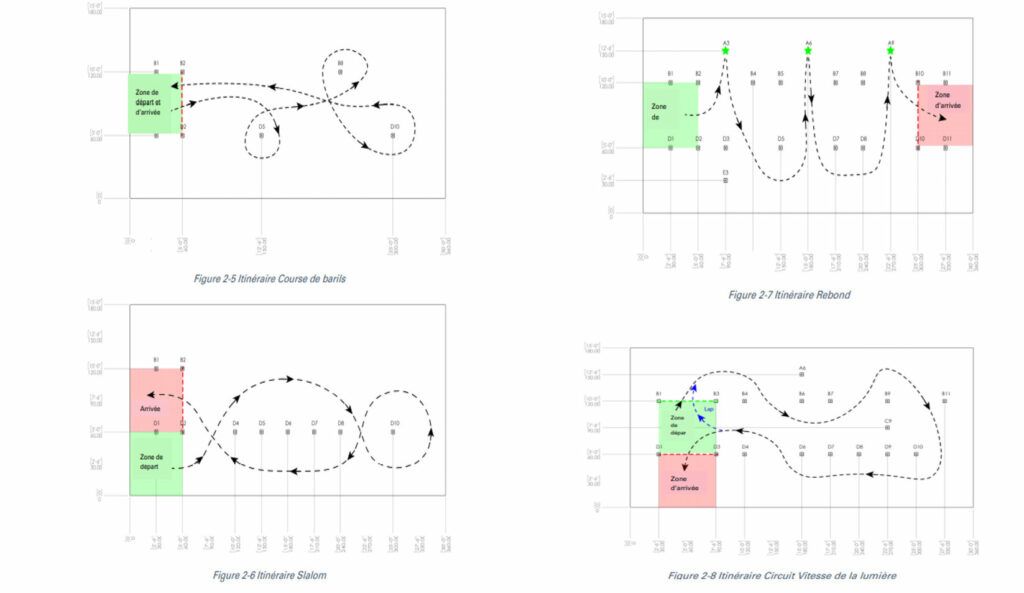
2 circuits distincts chronométrés
Mode « télécommandé »
Intervention d’un pilote qui contrôle les déplacements et les actions du robot sur le terrain
Une 1ère course en évitant au maximum les obstacles présents sur le parcours.
2 autres parcours incluant récupération de balles à différents endroits du terrain de jeu et lancé dans le zone de point avec un précision de 100%
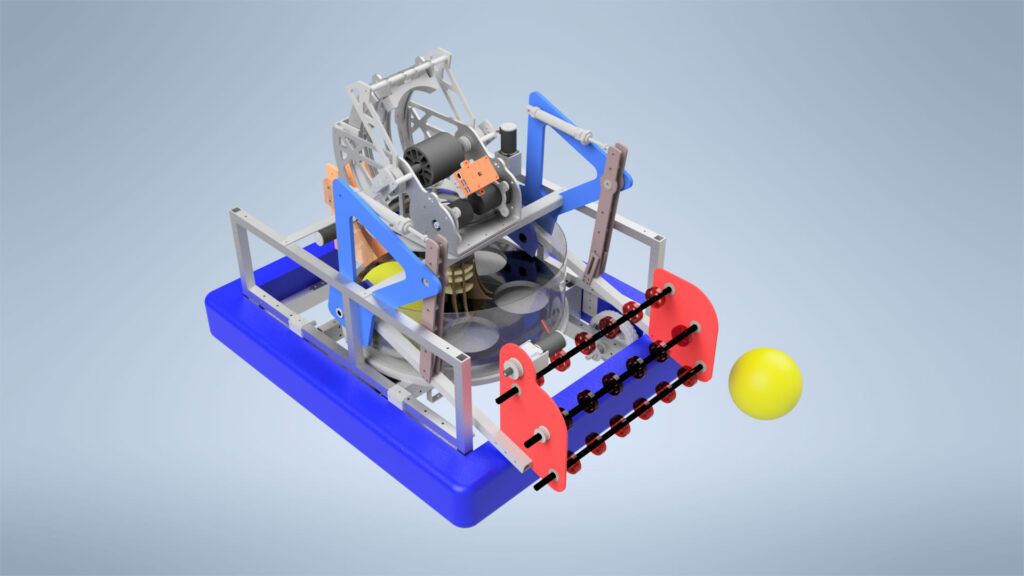
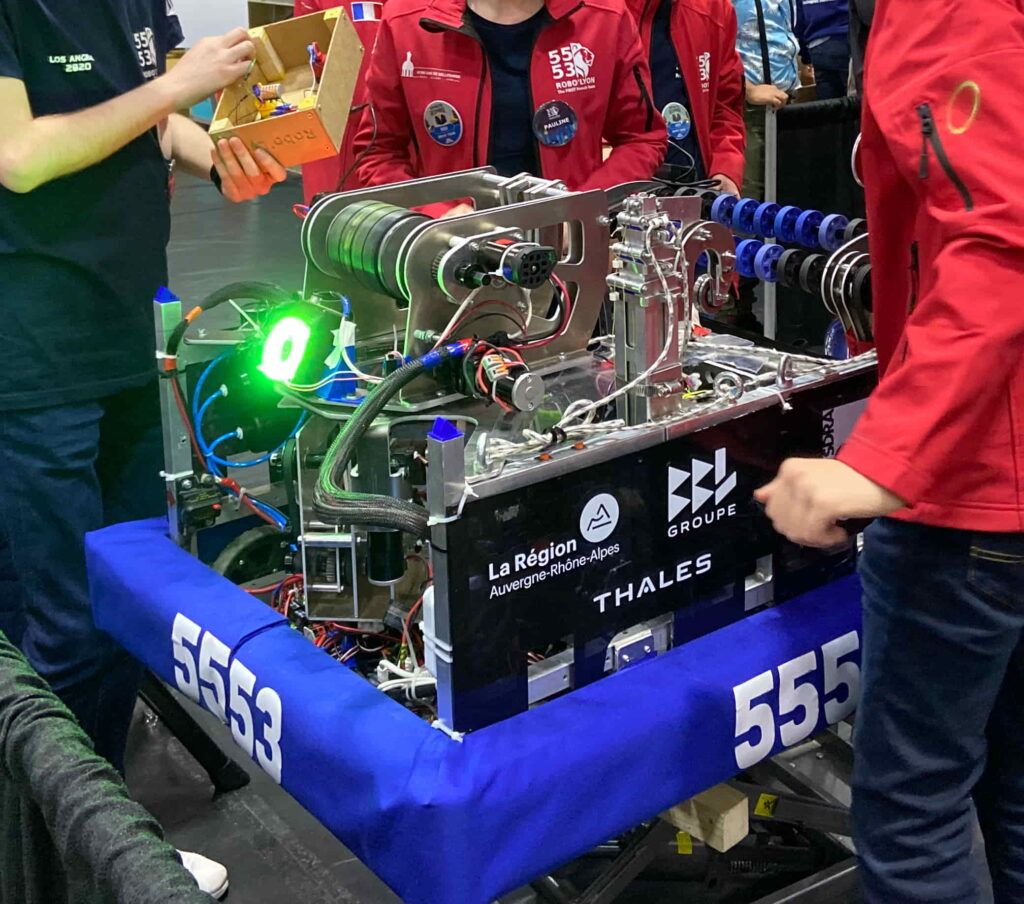
Notre Robot : SCRUMTROOPER 2.0
Nous travaillons à une version améliorée de notre robot 2020, nourris des échanges qui nous avons eu avec les différentes équipes présentent à Los Angeles l’année dernière.
La base pilotable :
- 6 roues motrices
- Vitesse de 11,5 ft/s
- 4 moteurs Neo sans brosse
L’Intake :
- 3 jeux de roues
- rétractable grâce à 2 verins
Le barillet :
- Le barillet nous permet de stocker les balles au fur et à mesures et de les éjecter à un moment donné.
- Il est équipé d’un moteur pour le faire tourner et grâce à des roues il peut éjecter les balles vers le shooter. Cet élément est similaire à un revolver
- La construction du barillet est un véritable défi pour l’équipe car ce système n’a jamais été proposer en compétition.
Le shooter :
- Il utilise le principe d’inertie
- 2 jeux de roues pour tirer
- Une Tourelle à 360%
- Un angle de tire ajustable
Le programme :
- Fait en language C++
- Utilisation d’un logiciel de reconnaissance visuel
- Réglages des moteurs