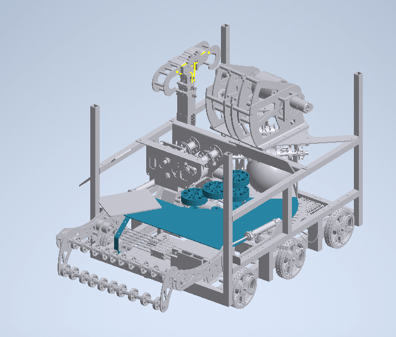
En ce début de saison, l’équipe doit améliorer Scrumtrooper, notre robot de l’année dernière, compétiteur à Los Angeles, afin de répondre au défi « AT HOME ». Une de ces évolutions concerne le convoyeur.
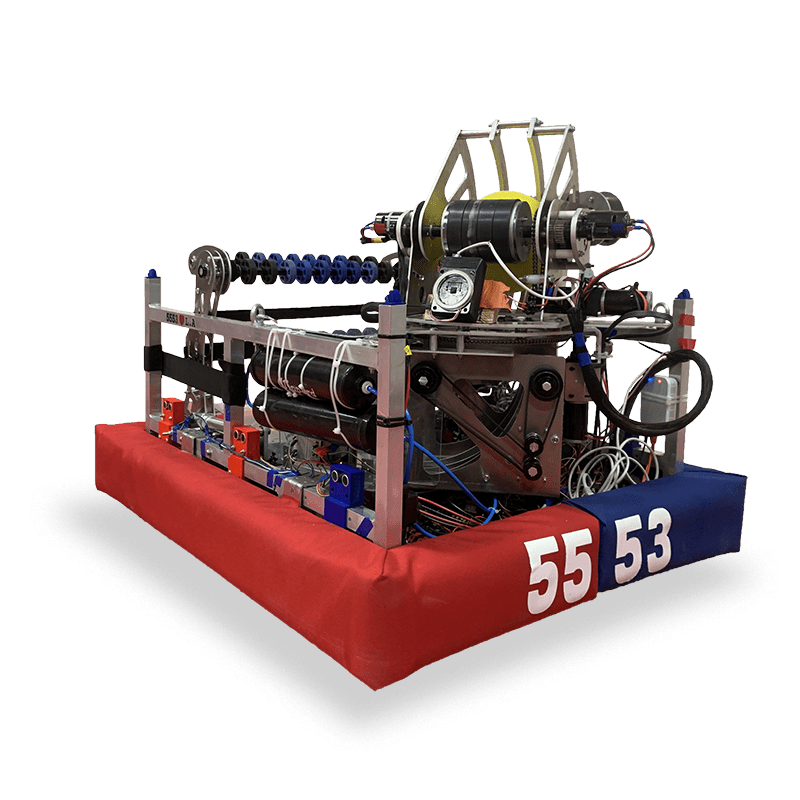
L’idée est de remplacer le convoyeur actuel par un barillet, car nous nous sommes aperçu, lors de la compétition à Los Angeles, que ce mécanisme était un vrai plus pour les robots qui l’avaient mis en œuvre : il fait gagner du temps et éviter les blocages de balles lors du chargement de celles-ci.
Le convoyeur est un élément essentiel du robot car il permet de transmettre au Feeder les balles récupérées par l’Intake sur le terrain ; le feeder permettant ensuite de guider ces balles jusqu’au shooter.
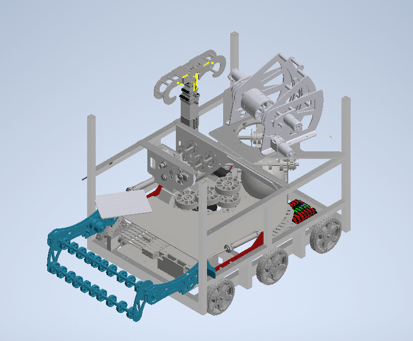
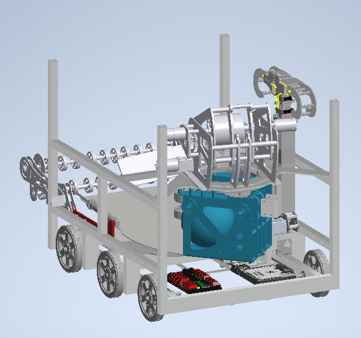
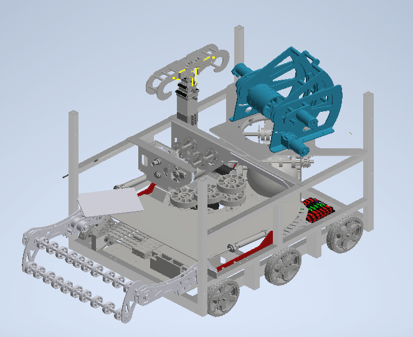
L’intérêt d’un barillet est qu’il permet de stocker les balles au fur et à mesure et de les éjecter à la demande, là où un convoyer ne fait que transmettre les balles, avec un risque de blocage élevé si plusieurs balles sont ensembles dans le convoyeur.
Une partie de l’équipe travaille sur le barillet. Pour l’instant, elle est encore en phase de prototypage : plusieurs essais sont nécessaires pour trouver le mécanisme et les réglages idéals pour le robot.
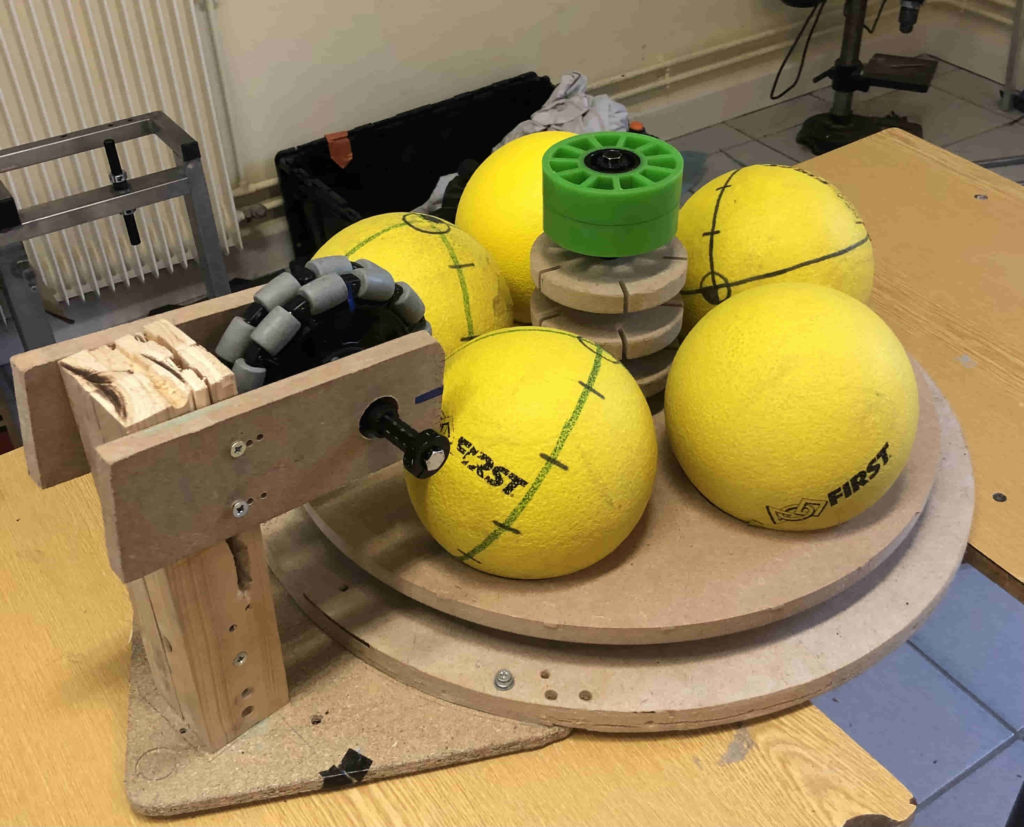
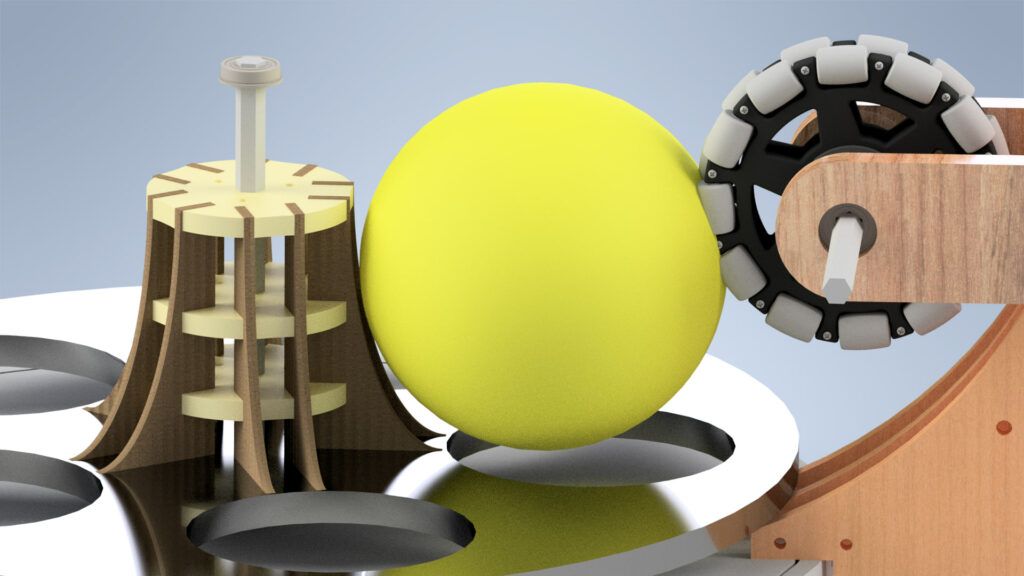
Le barillet possède un moteur qui va faire tourner le réservoir de balles et grâce à des pales va envoyer les balles dans le Feeder. Cet élément reprend le système d’un revolver.
Un des problèmes à résoudre pour l’instant concerne le positionnement des balles dans le feeder. Plusieurs pistes sont explorées.
La construction du barillet est un réel défi pour l’équipe car ce système n’a jamais été proposé en compétition.