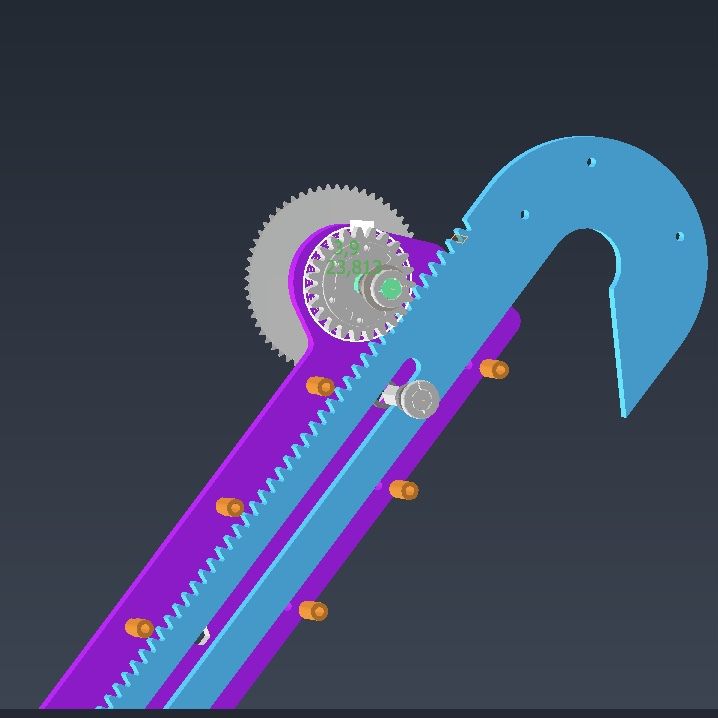
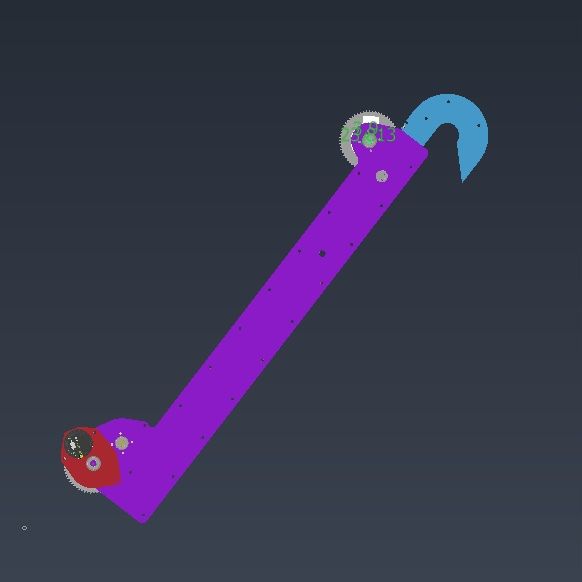
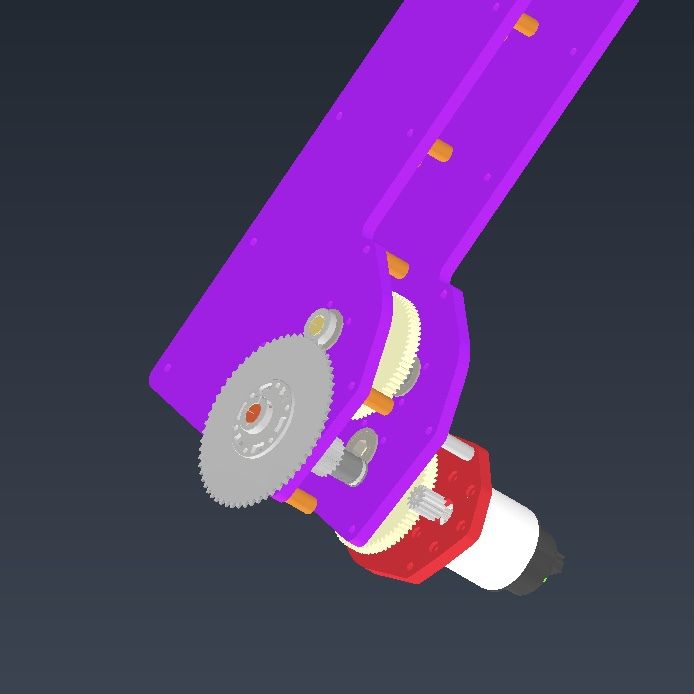
Une première version d’un des prototypes de “climber” sera bientôt prête à être usinée. Ce “climber “ permettra au robot de s’accrocher et de se soulever sur une chaine. Ce sont Timothée et Kylian qui travaillent sur ce prototype. Ils sont nouveaux dans l’équipe mais déjà très compétents! Leur “climber” est composé d’un guidage linéaire et une boite de vitesse de 20 de réduction qui donnera la force nécessaire pour soulever le robot. D’autres versions de ce mécanisme sont en cours de création. Vous les découvrirez lors des prochaines publications